

つまり,直進車両に対応した補正位相が0 の正弦関数項と,右左折車両に対応した補正位相がπ の正弦関数項に車両数に比例した結合係数で重み付けをすることにより,オフセットの調整を図っているのであるが,車両数すなわち確率p の変化に対してオフセットが連続的には変化せず,π の整数倍の値しか取らないことがわかる.
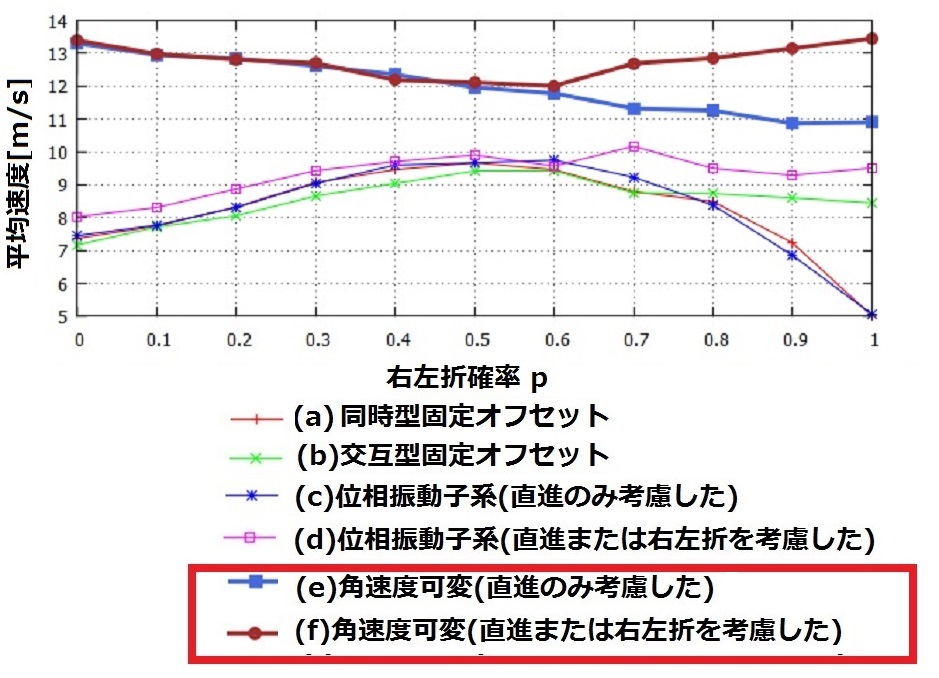
具体的には,ωi(t)τ はπ の整数倍であるπ に収束し,右左折確率がpが0.5 より小さい場合は直進が優先され,定常オフセットは直進車両にとって最適なωτ になり,また,p が0:5 より大きい場合は右左折が優先され,定常オフセットは右左折車両にとって最適なωτ-π になる.
なお,p = 0.5 の場合は係数は零になり,制御を施さず,全振動子が任意の位相差で同期(等速運動) していることになる.
可変角速度位相振動子系による制御および右左折車両を考慮した補正項の有効性は確認できたが,本手法を実用に供するためには,任意の車両数つまり右左折確率の値でも本手法が有効であることを示す必要があり,交通流量や交差点間距離が一定でない場合での検証の必要性が浮き彫りとなったと考える.