右左折を考慮した制御について考えてます.
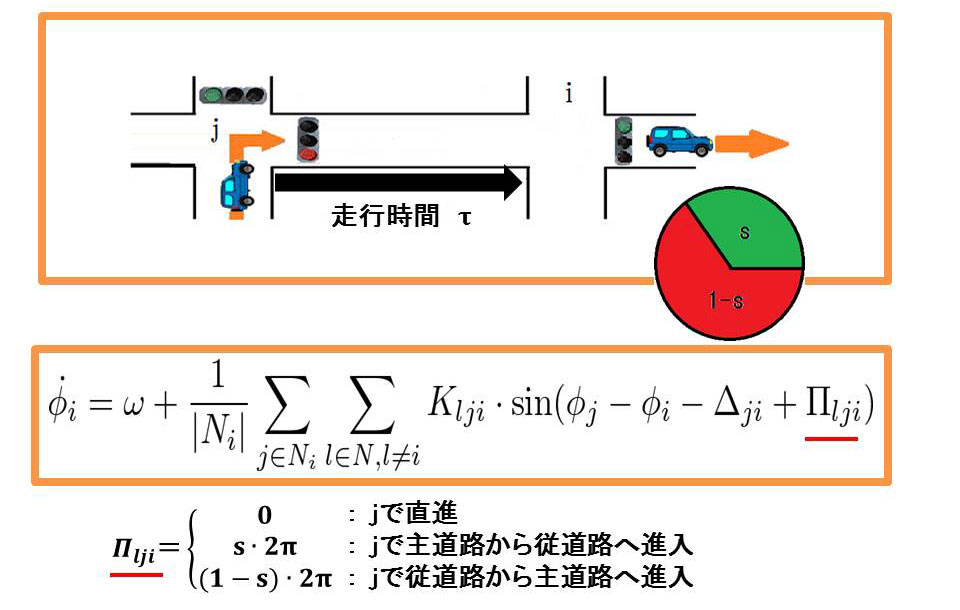
最初に,直進で車両が走行する場合で考えます.
ここで,信号機jを青信号で車両が通過すると,信号機iを赤信号で車両が停止することになるため,オフセット制御を適用すると信号機iは青信号で車両を通過することもでき,補正項を加えなくてもよい.
右左折を考慮した制御では,直進で車両を走行する場合と仮定すると,進行する方向の信号機が赤信号で車両が停止するためである.
また,進行する方向の信号機を青信号で車両を通過させるためには,隣接する交差点の走行時間と進行する方向の信号機の赤信号の時間分を加えることより車両を青信号で通過するができます.
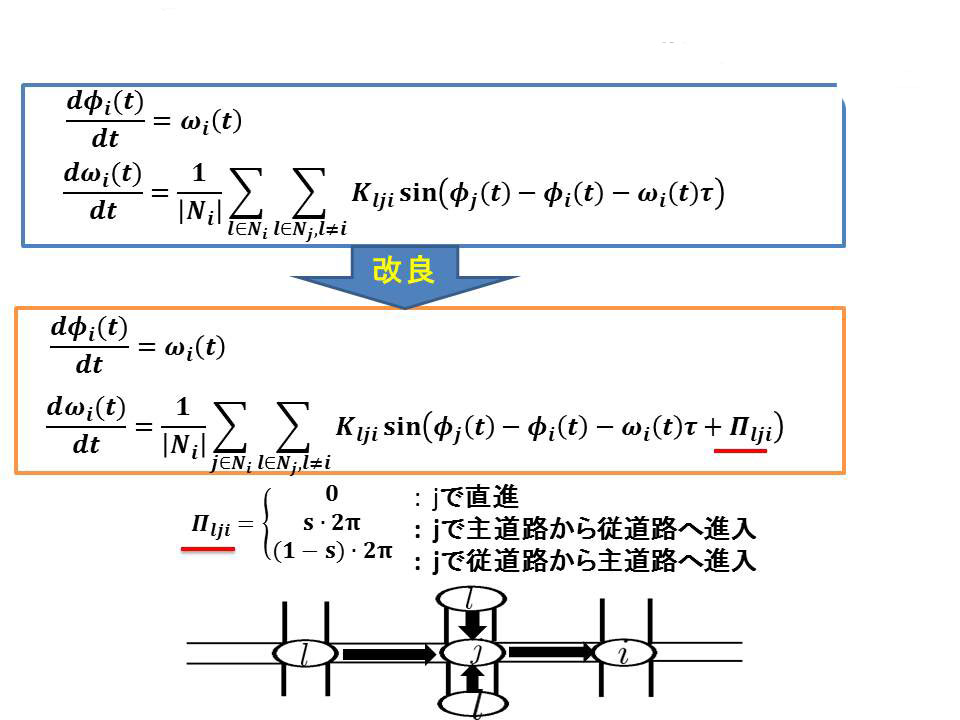
また,その補正を加えた時の固定角速度位相振動子系による交通信号機制御の微分方程式がこちらに表わすことができます。
これが右左折を考慮したオフセット制御となります。ここが補正項π_ljiは直進で進入するか右左折で進入するかで変わる定数です。

直進する制御では、位相ϕ_iの角速度ω_iを可変にすることにより,オフセットがω_i τで最適オフセットΔ=ω_i τを実現することで,双方向で車両が走行する場合における最適オフセットの条件であるωτ=nπを満たすこともでき,角速度ω_iに収束することできます.右左折する考慮した制御において,位相ϕ_0の角速度ω_0を可変にすることにより,オフセットがω_0 τで最適オフセットΔ=ω_0 τを実現することで,双方向で車両が走行する場合における最適オフセットの条件であるωτ=nπを満たすこともでき,角速度ω_0に収束することできて,交差点によって異なる進行方向の信号機を赤信号の時間分を加えることより車両を青信号で通過することができます.これが可変角速度位相振動子系による交通信号機のオフセット制御の微分方程式として表すことができます.