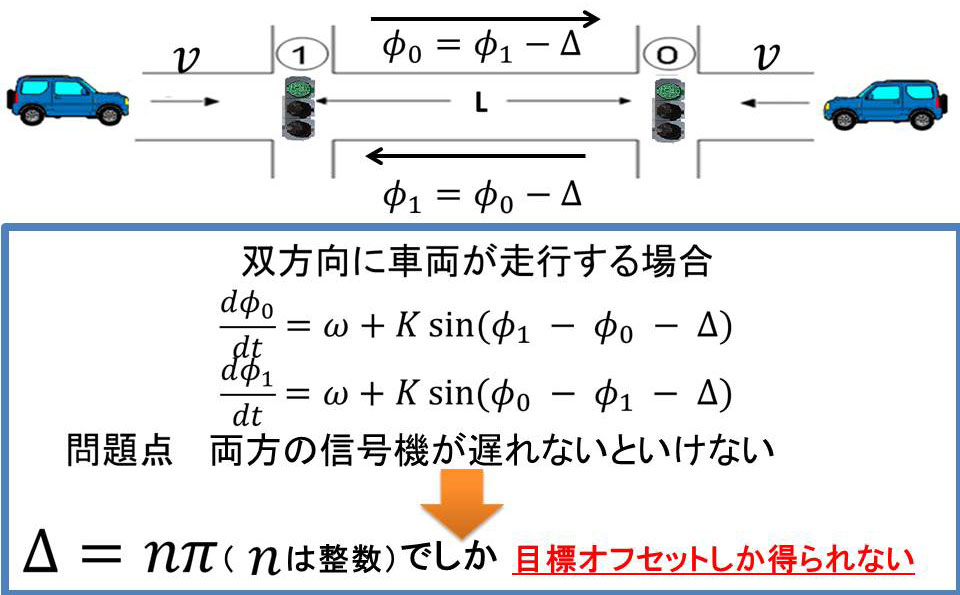
しかし、このように交差点0と1を双方向に車両が走行する場合には、信号機0が1よりΔ遅れ、かつ、信号機1が0よりΔ遅れなければなりません。
この場合の位相振動子系による制御はこのようになりますが、オフセット両方をみたすのはΔがπの整数倍のときしかないことがわかります。つまり、ほとんどの場合最適オフセットが厳密に得られることがありません。

この問題の解決策として、次のような方法が考えられています。目標オフセットに着目すると、この式の中で、信号機のパラメータでない走行時間τは変更できませんが、信号機のパラメータである角速度(信号の基準角速度)ωが時間的に変化する変数として変更が可能になります.
位相ϕ_0の角速度ω_0を可変にすることにより,オフセットがω_0 τで最適オフセットΔ=ω_0 τを実現することで,双方向で車両が走行する場合における最適オフセットの条件であるωτ=nπを満たすこともでき,角速度ω_0に収束することできます.
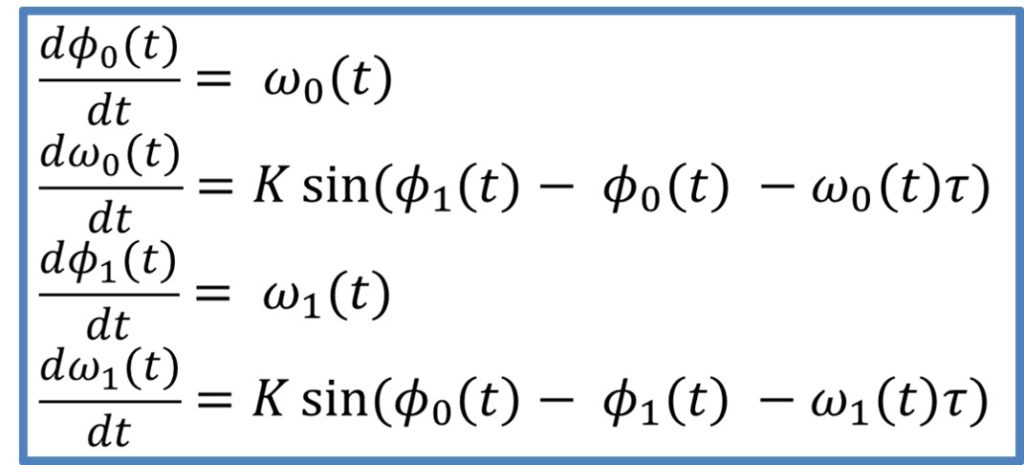
これを2次の位相振動子の常微分方程式で表すことができます.これが双方向に車両が走行する場合の角速度を可変にした位相振動子系による制御になります.